Autonomous Vehicle
- Autonomous driving test system
-

- Definition of autonomous vehicle
-
An autonomous vehicle is a vehicle that drives to the given destination by recognizing its surroundings, judging the driving situation, and controlling the vehicle without the driver’s intervention.
Recognition Judgment Control - Routing Algorithm
- Vehicle-to-everthing(V2X)
- ADAS sensor (camera, Lidar, Radar)
- Lane, Line
- Tunnels, Overpass
- Vehicles, Pedestrian
- Traffic Signal, Accidents Vehicles, etc.
- Turn Left/Right, Change Lane, Passing
- Stop/Go, Driving Route, Speed
- Forward Target, etc.
- Vehicle Control, Steering Angle, Torque
- Speed Acceleration / Deceleration
- Components of Autonomous Vehicles
-
Autonomous vehicles are equipped with various sensors to recognize the environment. Ultrasonic sensors detect obstacles when parking. Radar sensors detect middle and long distance objects and measure the speed and position of objects in relation to the vehicle’s movement. Lidar sensors scan the surrounding with invisible laser light and create it as high-accuracy 3D images to recognize the environment. Camera-type video sensors recognize important visual information, such as the color or symbol of an object to use it for autonomous driving.
- Main parts of autonomous vehicles
-
-
ACC
(Adaptive Cruise Control) -
SCC
(Smart Cruise Control) -
LDWS
(Lane Departure Warning System) -
LKAS
(Lane Keeping Assist System) -
BSD
(Blind Spot Detection) -
LCA
(Lane Change Assistant System) -
RPC
(Rear Pre Crash System) -
FCWS
(Forward Collision Warning System) -
AEB
(Automatic Emergency Brake) -
USS
(Ultra Sonic Sensor) -
MDPS
(Motor Driven Power Steering) -
IBS
(Intelligent Brake System) -
MFC
(Multi Function Camera) -
Radar
(Radio Detection And Ranging) -
Lidar
(Light Detection And Ranging)
-
ADAS(Advanced Driver Assistance System)
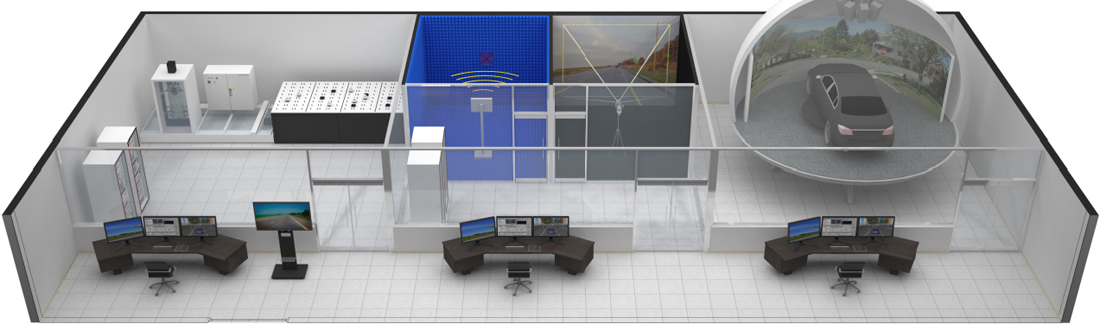
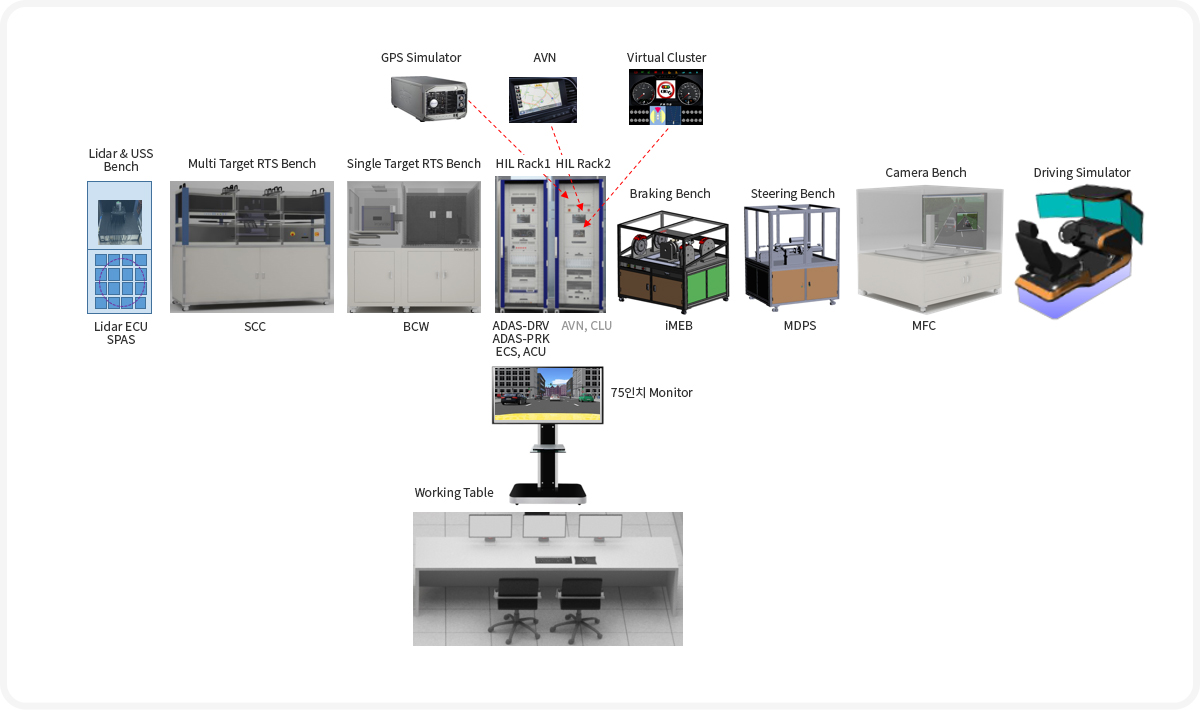
- ADAS HIL SYSTEM
-

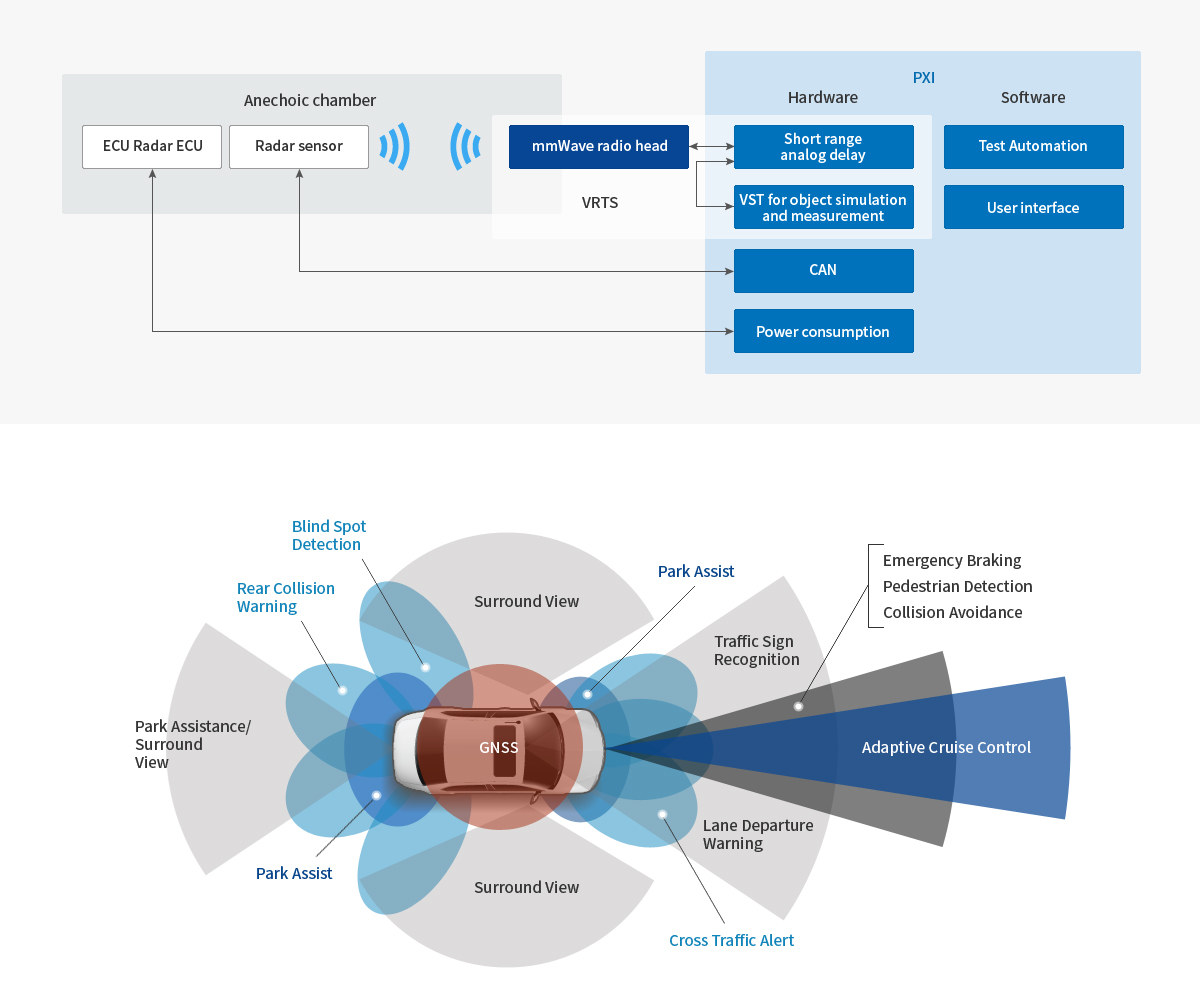
Vehicle Radar Test System (VRTS)
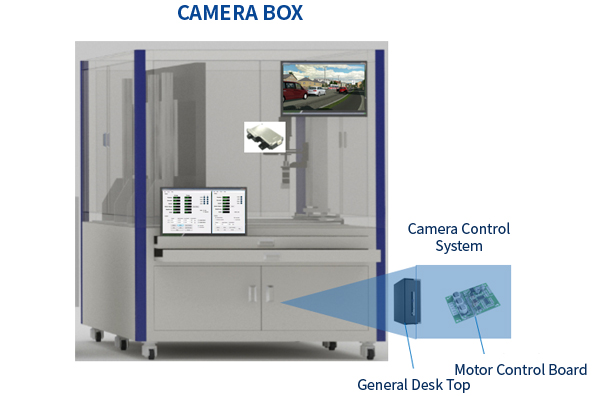
The Vehicle Radar Test System (VRTS) can simultaneously perform best-in-class radar target simulation and parameter measurements, reducing test time using a single instrument. It also consists of a modular solution to facilitate the platform upgrade for future radar bandwidth.
- Block diagram
-
- Main specifications
-

Synchronization <1 ㎲ Scene creation support API-based IPG, TASS, VIRES, Unity Camera interface MIPI CSI-2, FPD-Link, GMSL, HDMI Radar sensor support 77 GHz, 79 GHz (Coming Soon) Radar emulation shortest distance 2m V2X Emulation protocol DSRC, 4G C-V2X Location emulation protocol GNSS, GPS, GLONASS Other I /O General Purpose I / O, CAN, LIN, FlexRay, Automotive Ethernet  Being a simplified version of the real world scenario, the radar target simulator is located directly in
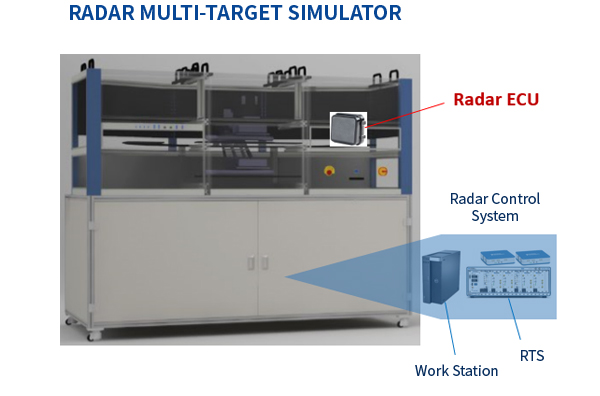
Being a simplified version of the real world scenario, the radar target simulator is located directly in
front of the sensor to increase the reality of the radar test. This system allows you to simulate an
emergency immediately without spending a lot of time moving objects. It quickly identifies potential
sensor errors by playing back previously saved scenarios or parameterizing certain elements of the test.
Vehicle test studies can be interlocked with modern high-tech infrastructure for simulating complex
and realistic ADAS scenarios to evaluate data fusion systems.
- Camera Test Bench & Radar Multi-Target Simulator
-
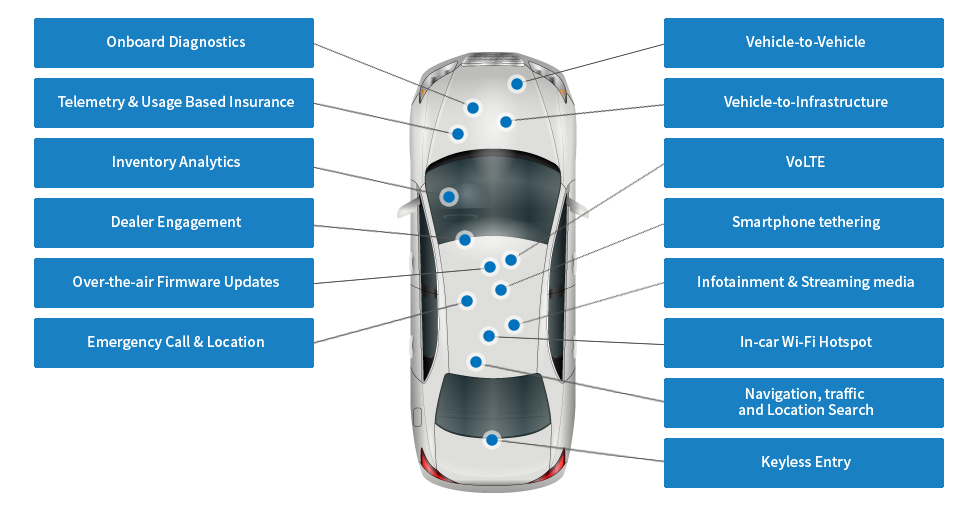
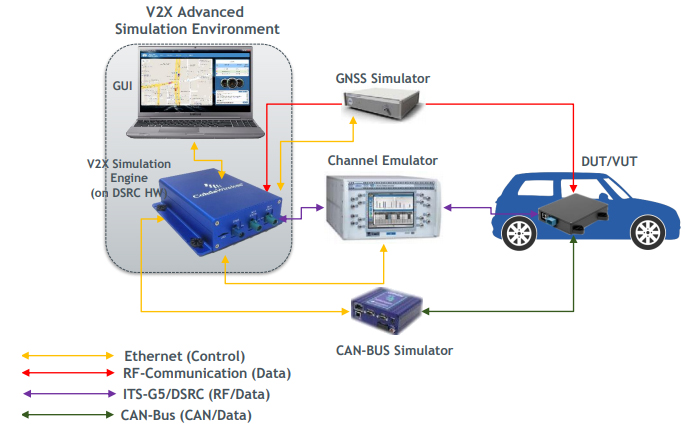
V2X
- V2X Communication
-
- V2V (Vehicle to Vehicle): Vehicle to Vehicle Communication
- V2I (Vehicle to Infra): Vehicle to Road Infra Communication
- V2P (Vehicle to Pedestrian): Vehicle to Pedestrian Communication
- V2N (Vehicle to Nomadic Devices): Vehicle to Nomadic Devices Communication
- V2G (Vehicle to Grid): Vehicle to Grid Communication
- WAVE
-
WLAN-V2X communication is based on a set of standards proposed by the American Society of Testing and Materials (ASTM). The ASTM E 2213 series standard is about wireless communication for high-speed information exchange between the vehicle itself and the road infrastructure. The first standard in the series was announced in 2002, and the term WAVE (Wireless Access in the Vehicular Environments) was first used.
- IEEE 802.11
-
Since 2004, the IEEE started studying wireless access to vehicles based on the IEEE 802.11 standard product family for wireless local area network (WLAN). The initial standard for wireless communication in vehicles is known as IEEE 802.11p. Later in 2012, IEEE 802.11p was integrated into IEEE 802.11.
- V2V
-
Around in 2007, the IEEE started developing standardization of the 1609.x standard product family and the security framework (for WAVE). Soon, the SAE began to specify standards for V2V communications applications.
- ITS
-
Creating the Intelligent Transport Systems (ITS), the European Telecommunication Standardization Institute (ETSI) started producing standards for protocols and applications. (ETSI created the term G5.) All of these standards are based on IEEE 802.11p technology.
- ARIB
-
Between 2012 and 2013, the Japanese Association of Radio Industries and Business (ARIB) designated IEEE 802.11, a V2V and V21 communications system in the 700 MHz frequency band as the base.
- ITU(ETSI, ARIB, TTA)
-
In 2015, the ITU published a summary of all V2V and V21 standards, which are composed systems designated by ETSI, IEEE, ARIB, and TTA(Telecommunications Technology Association) and are widely used all over the world.
- V2I, V2V for LTE-V
-
In 2017, the 3GPP announced the first set of LTE-V physical layer standards for V2I and V2V communications using IEEE 802.11 WLAN and other wireless technologies.
- V2X Test Solutions
-
Learn more for the test solution
-
Eco-friendliness (EV,HEV, PHEV,FCEV)
 Eco-driving technology which is environment-friendly, we complement our own technology for more accurate testing to provide competitive products.
learn more
Eco-driving technology which is environment-friendly, we complement our own technology for more accurate testing to provide competitive products.
learn more
-
Ethernet for cars
 With automotive based Ethernet technology we are making specialized test products to increase the speed and stability of in-vehicle data communication.
learn more
With automotive based Ethernet technology we are making specialized test products to increase the speed and stability of in-vehicle data communication.
learn more
-
HIL TESTING SYSTEMS
 In order to calculate fast and accurate evaluation data based on the best HIL TESTING SYSTEMS solution, TechWays studies and develops various HIL products such as S/W, H/W based on advanced technology.
learn more
In order to calculate fast and accurate evaluation data based on the best HIL TESTING SYSTEMS solution, TechWays studies and develops various HIL products such as S/W, H/W based on advanced technology.
learn more
-
Electrical Units
 We study and develop an optimal solution that allows you to more accurately measure the electric units and communication parts of your vehicle.
learn more
We study and develop an optimal solution that allows you to more accurately measure the electric units and communication parts of your vehicle.
learn more
-
Virtual driving environment simulation
 In consideration of the various driving environments of the car, we are developing a professional solution that helps to conduct more accurate test through virtual simulation such as surrounding objects and road conditions.
learn more
In consideration of the various driving environments of the car, we are developing a professional solution that helps to conduct more accurate test through virtual simulation such as surrounding objects and road conditions.
learn more
-
NETWORK TEST
 To validate the network appliance, we provide L2-3 Performance test(RFC-2544,RFC-2889), L4-7 Performance test(HTTP,HTTPS) and Security test(Attack, Malware) solutions.
learn more
To validate the network appliance, we provide L2-3 Performance test(RFC-2544,RFC-2889), L4-7 Performance test(HTTP,HTTPS) and Security test(Attack, Malware) solutions.
learn more
-
AP TEST SOLTUION (Wi-Fi)
 We provide AP Performance Test solution including TR-398 and AP Functional Test solution such as Roaming test, Mesh test and so on for Wi-Fi Router.
learn more
We provide AP Performance Test solution including TR-398 and AP Functional Test solution such as Roaming test, Mesh test and so on for Wi-Fi Router.
learn more
